
Un projet très particulier…
Voici la page décrivant un projet particulier. Il s’agit de la création d’une machine autonome à castrer le maïs. J’ai malheureusement dû arrêter le développement de ce robot agricole en octobre 2024 pour des raisons de propriété intellectuelle.
Avant de se pencher sur le robot, il faut déjà comprendre ce qu’est la castration du maïs.
La culture du maïs brièvement expliquée

La culture du maïs semences a pour but de faire un croisement entre deux espèces de maïs afin d’obtenir un grain hybride qui regroupe différents avantages (meilleur rendement, résistance aux maladies et adaptation aux conditions climatiques).
Pour se faire, l’agriculteur plante un nombre donnée (généralement 4) de rangs de maïs de la première espèce puis deux rangs de la seconde espèce et continue le processus sur toute la surface de son champ.
Les pieds de maïs sont, par nature, à la fois mâle et femelle, car ils disposent à la fois des organes reproducteurs mâle et femelle. Le processus de castration se résume donc à supprimer les panicules mâles des rangs « femelles » pour éviter que les rangs femelles se pollinisent entre eux, dans le but d’assurer le croisement des espèces et que la même espèce ne se pollinise pas elle-même.
Pour cela, l’agriculteur a recours à de la main d’œuvre pour retirer la panicule mâle de ses rangs femelles, tel un vigneron a besoin de saisonniers pour récolter ses grappes. Ce processus s’appelle la castration du maïs.
Des milliers d’euros de dépenses chaque années pouvant être économisées
La castration du maïs est assez couteuse pour les agriculteurs. En effet, j’ai décidé de travailler dans les champs de maïs l’été 2023 afin de financer un de mes projets, et c’est en entendant l’agriculteur pour lequel je travaillais dire que la castration du champ lui avait coûté plus de 7 000€, que j’ai réalisé qu’il y a là un besoin d’automatiser la main d’œuvre qui pourrait réaliser de grosse économies à nos agriculteurs.
Le fonctionnement du robot
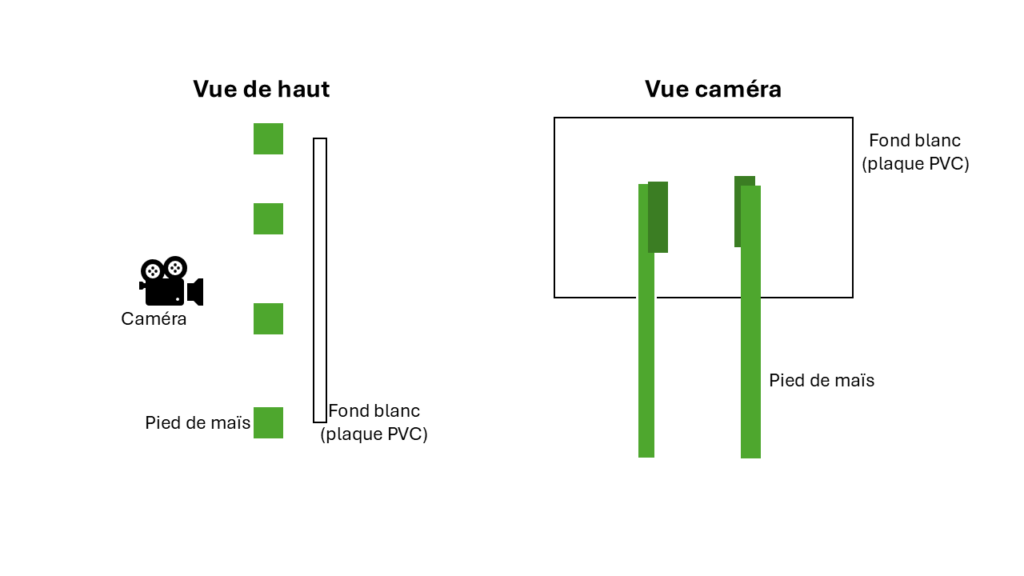
L’idée initiale était de positionner une caméra d’un côté des panicules à castrer, et une planche en PVC blanche de l’autre (afin d’avoir un fond uni pour une meilleure efficacité de détection des panicules). La caméra était ensuite pilotée par un ordinateur équipé d’un GPU/TPU puissant capable de faire tourner un modèle d’IA de vision par ordinateur entrainé sur de nombreuses images de panicules sur un fond blanc. Ce modèle avait ensuite comme objectif de détecter les panicules de maïs en temps réel et de donner leurs coordonnées à un bras robotisé ayant pour rôle la castration du maïs (retirer la panicule).
À terme, le robot avait comme objectif d’être motorisé afin d’avancer tout seul à travers le champ.
Les débuts du développement
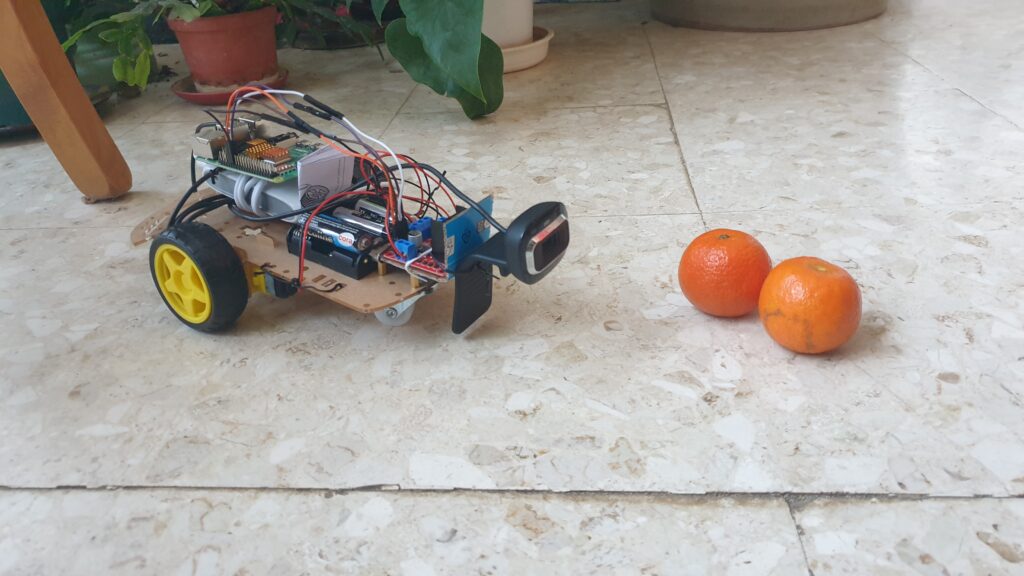
Le tout premier prototype de robot m’a servi pour tester l’entrainement de modèles de vision par ordinateur. J’ai commencé par entrainer un premier modèle d’IA basé sur le modèle «SSD MobileNet V2 FPNLite 640×640», que j’ai entrainé à détecter des clémentines, dans le but de prouver que je peux demander à un robot d’effectuer une action en détectant un objet avec sa caméra. J’ai fait tourner le modèle sur un Raspberry PI 4 pour ce test. Le micro-ordinateur avait comme instructions d’alimenter les moteurs des roues lorsque le modèle d’IA détectait une clémentine via la webcam à l’avant.
Le programme était fonctionnel, je suis donc passé au niveau supérieur du « proof of concept ».
Réalisation d’autres essais
Suite à cet essai concluent, j’ai créé ce que j’appelle un « récolteur de données ». Il s’agit en fait d’une plaque de PVC blanche à laquelle j’ai accroché un bras articulé en plastique, auquel j’ai branché une webcam orientée vers la plaque et un anneau de lumière autour de cette webcam. Ce récolteur de données avait pour objectif de prendre des photos à intervalles réguliers, que je pourrai ensuite utiliser dans un champ de maïs semences quand le maïs aura poussé. L’anneau de lumière rendait le tout plus lumineux, ce qui a permis d’augmenter grandement la qualité des photos prises.
J’ai utilisé ce récolteur de données une première fois sur une guirlande LED de Noël en attendant la période de maturation du maïs, et le modèle performait bien. J’ai également réalisé un tableau avec différents modèles de base pour voir lequel est le mieux adapté à la détection, à savoir le rapport qualité de résultat / images par secondes. C’est après quelques temps que j’ai découvert le modèle de base « YOLO v7 », qui est très performant. J’ai également acheté un Raspberry PI 5 lors de sa sortie pour tester YOLO v7 sur ce dernier. Ce dernier tourne plutôt bien sur le nouveau micro-ordinateur.
Le récolteur de données, en revanche, ne m’a pas servi d’avantage pour ce projet.
Un an après : période de pousse du maïs


Un an après avoir eu l’idée du projet, je suis retourné dans les champs où j’ai travaillé. J’ai pris de nombreuses photos de panicules de maïs vu de haut et j’ai trié ces photos à l’aide de l’outil python Labelimage. J’ai ensuite entrainé le modèle avec les images de panicules vues de haut. Voici le résultat de la détection par l’IA (les panicules se trouvent dans les encadrés rouges) :
Des résultats très concluants !
Comme vous pouvez le voir, ce tout premier test a été très concluant. L’IA est seulement le premier prototype et pourtant elle détecte bien les panicules. Après avoir analysé ces résultats, j’en ai déduit un autre défi à relever : certaines panicules sont cachées par les feuilles du pied de maïs. Une potentielle solution serait d’ajouter un souffleur puissant pour forcer les feuilles à se mettre de côté pendant que la caméra passe au dessus du pied.
La fin du projet : brevet déposé
Comme on dit, toute belle chose a une fin. Malheureusement pour moi, il semble que je n’ai pas été le seul à avoir l’idée de cette machine. En effet, un brevet sur une machine très similaire (disponible ici) a été rendu publique en octobre 2024 par le Centre de recherche en équipement intelligents d’agriculture et de Beijing (Intelligent Equipment RES center Beijing Academy of Agriculture and Forstry Sciences). Le projet a donc dû toucher à sa fin, mais je peux en tirer la conclusion que la prochaine fois que j’ai une idée qui permet le dépôt d’un brevet, la première chose à faire est de se dépêcher de déposer un brevet afin de sécuriser son invention avant que quelqu’un d’autre ait la même idée.
Plus qu’un projet, le début d’une grande histoire
Ce projet n’a pas été qu’un simple projet, il m’a donné un réel objectif quotidien de progresser dans son développement. J’ai résumé dans cette page le projet dans ses principales étapes, mais je n’ai pas parlé de toutes les recherches sur les IA de vision par ordinateur que j’ai fait, les difficultés que j’ai rencontré lors de leur entrainement, les prototypes de « récolteurs de données » que j’ai fait à l’aide d’une meuleuse alors que je ne savais même pas comment s’appelait cet outil avant, les longs trajets à pied que j’ai fait avec des matériaux dès que j’avais du temps libre et aucun moyen de transports, ou même lorsque j’ai raté des cours pour aller à la rencontre d’un inventeur ayant déposé des brevets pour lui poser des questions à ce sujet.
A mes yeux, ce n’est pas qu’un simple projet tombé à l’eau. C’est la preuve que mes idées ne sont pas vaines, et c’est également ce projet qui m’a réconforté dans l’idée d’entreprendre à l’avenir. J’ai découvert toutes les péripéties qu’un tel projet peut donner, et maintenant, je ne demande qu’à commencer un nouveau projet. Peut-être que le suivant mènera enfin à la création d’une entreprise ?
Quoi qu’il en soit, je ne regrette absolument pas avoir dédié autant de temps et d’argent dans ce projet, car il m’a permis d’acquérir beaucoup de connaissances. Si vous avez des questions au sujet de ce projet, j’y répondrai avec la grande joie de savoir ce projet intéresse quelqu’un.